Meet the people
Team work in the Robotics Master
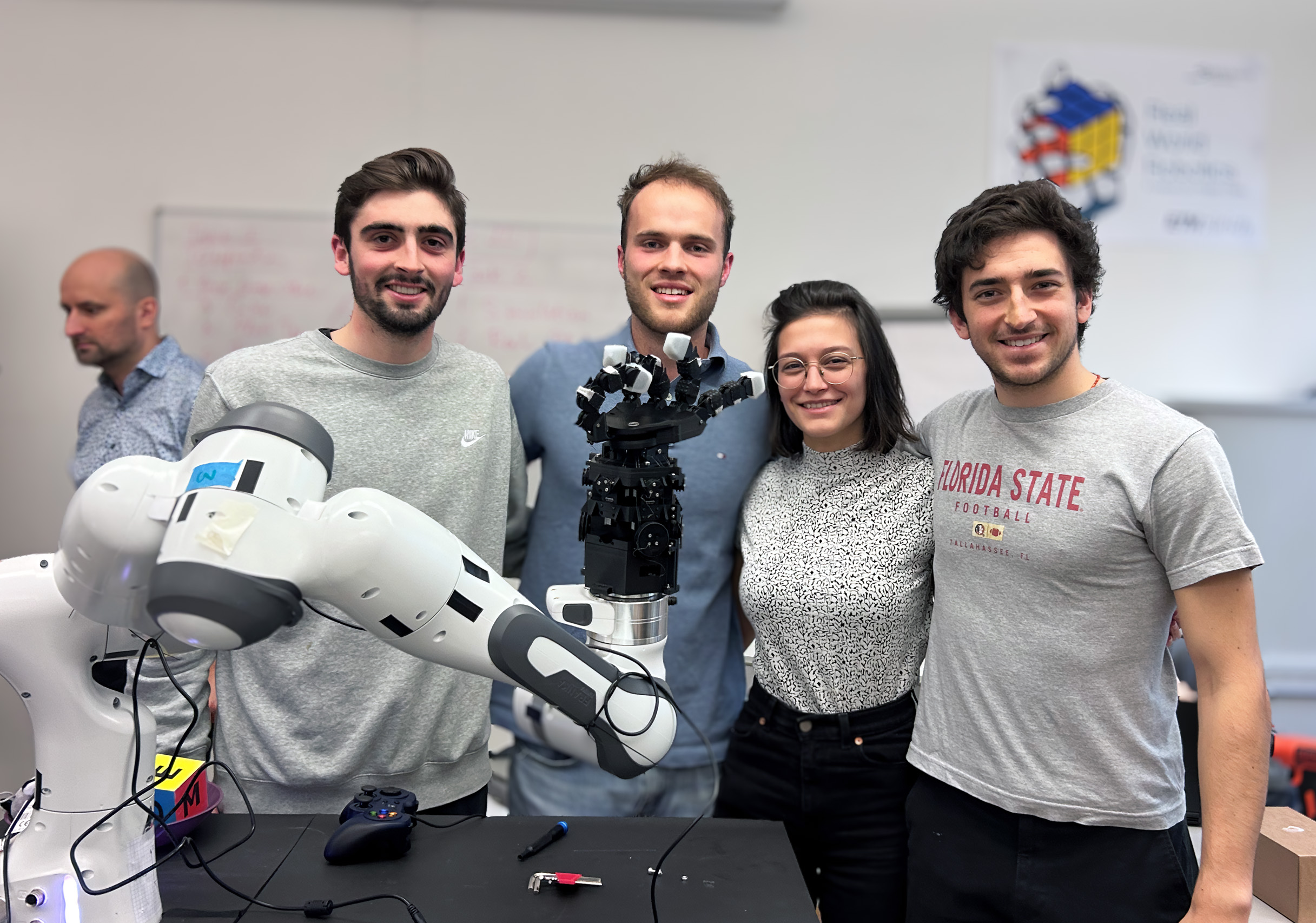
“Our robotic hand performed best in the challenge at the end of our Robotics Master class. In teams, we had the task to design a hand capable of grasping a diverse set of objects with complex shapes under teleoperation. Then, we employed reinforcement learning to 'teach' the hand how to rotate a ball around an axis at a velocity beyond a threshold rotation speed.
The most profound insight from the class was to realise that outcomes rarely align with initial expectations. Continuous testing and iterative improvement are essential to build something that works. On a personal note, this project revealed the huge gap that exists between software and hardware. Performing tasks in the real world involves overcoming the well-known 'sim-to-real gap' and introduces an additional layer of complexity compared to simulation alone.”
– Matteo Leonforte, Master in Robotics, Systems and Control, 3rd semester

Robotics graduate becomes founder
How Joel Roos became a successful entrepreneur, after he had been on the brink of failure. Read Roos' story
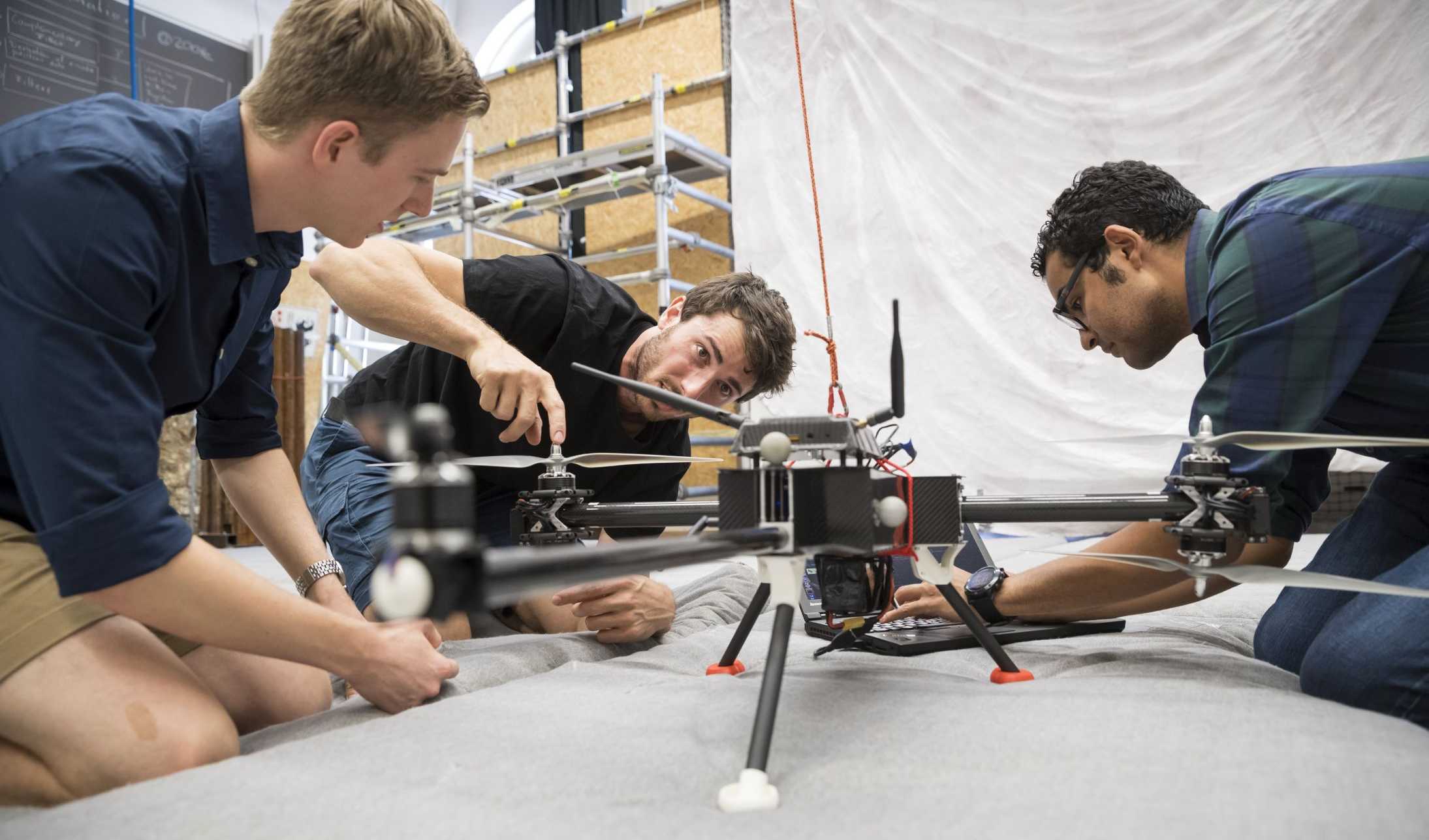
We're developing drones that can stick to walls
For his Master's thesis at the Autonomous Systems Lab, Timo Müller (middle) is developing with his colleagues Christian Sprecher (l.) and Kamel Mina (r.) a drone that can perform work on a wall or a ceiling. Classic drones cannot physically interact with structures in a reliable manner because of their under-actuated nature. Our drone is fully actuated, which means that it can apply forces in all directions. We plan to use this innovative “omnidirectional drone” in applications that require interaction between environment and drone. Applications include, but are not limited to, contact-based inspections, painting, coating and cleaning.